06. Tracking a Single Pixel
Nd787 C4 L06 04 Tracking A Single Pixel V1
Math Walkthrough
The diagram below shows a pixel that has moved from (x,y) at time t to (x+u, y+v) at time t+1 .
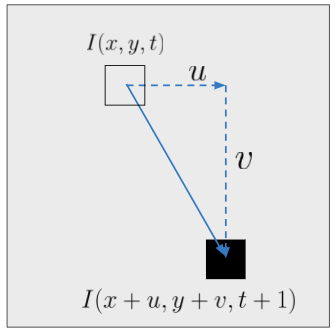
From this picture, it's easy to figure out the velocity vector (u,v) . But when we look at two real images, we'd first need to solve what's called the pixel correspondence problem . That is, we need to know which pixels in image 2 correspond to which pixels in image 1.
To solve this problem we make two assumption.
Assumption 1: the motion is small : this means we can look in the vicinity of where the pixel was to try to determine where it now is .
Assumption 2: the appearance doesn't change from t to t+1 : this assumption is best expressed mathematically.
This relationship is known as the brightness constancy constraint .
If we drop the time index and do a Taylor series expansion of the right hand side of this equation, we find the following:
We can plug this back into the brightness constancy constraint and reorganize some terms to find the following:
Or using the notation from the video (which is common in this field):
This equation says that any change in the appearance of a pixel over time has to be explained by spatial motion induced by the camera movement.
Note: I(x,y,t) gives the intensity of the pixel at location (x,y) at time t . If this is a gray-scale image, this intensity would be a single number corresponding to the darkness of the pixel. If this were a color image it might be a 3-vector with values giving the amount of red, green, and blue in the image.